Introduction to TheSyDeKick
What is the TheSydeKick
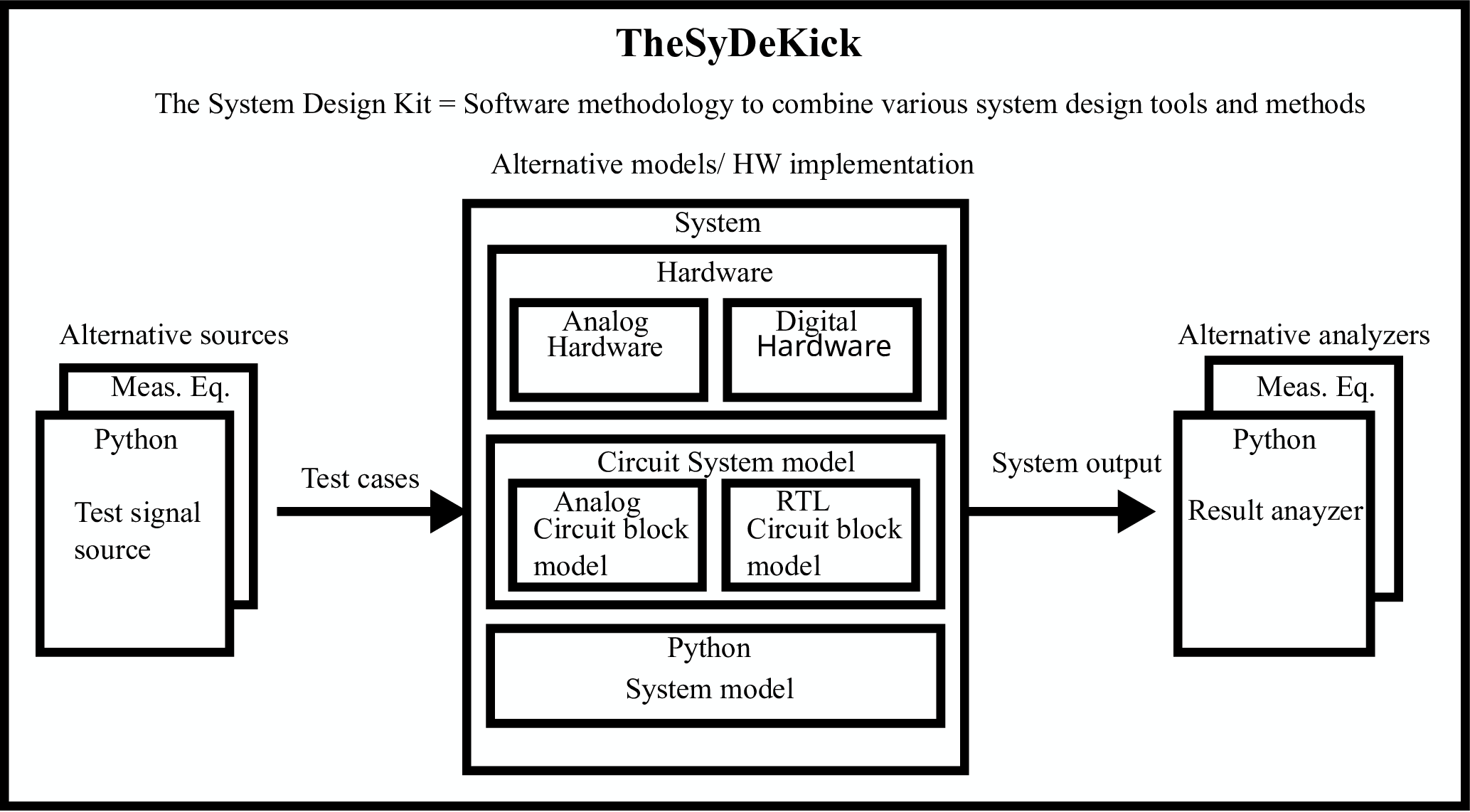
TheSyDeKick is a development and testing framework for electronic systems. It is primarily targeted for design and testing of integrated microelectronic designs, circuits and systems. The operation principle of TheSDK is depicted below.
This is the master documentation of TheSyDeKick. These pages provide an introduction and browsable documentation for the core Entities: thesdk, RTL, spice and ads.
Operation principle
TheSyDeKick supports the system design by “testing first” principle. Design is started by writing a system test bench and simple model for the design under test with Python. Gradually the implementation details are added to the DUT by introducing analog circuit model or RTL level descriptions of digital circuitry. Circuit level simulations are executed by calling external simulators like Spectre, Eldo, NGSpice or Questasim, Icarus, and GHDL. This makes it possible to write the test cases and analyses for the system only once, and carry out the circuit development with those tests from beginning to end.
It targets to using a single control environment to simulate, design and measure the system components with various tools by using a single “Control environment” for control, analysis, and visualization of the results.
TheSyDeKick also aims for full support of system measurements. The intended operation is that once the circuit or system is manufactured, the signal sources and analyzers of TheSDK model are replaced with measurement equipment, and the same tests are carried out for the actual hardware within the same framework. This requires a measurement hardware driver libraries that are to be developed and released independently from TheSyDeKick core modules to follow the key principle of TheSyDeKick: modularity.
Modular system description with objects
As TheSyDeKick targets hardware modeling, every instance can be thought as a piece of equipment or hardware, as depicted below
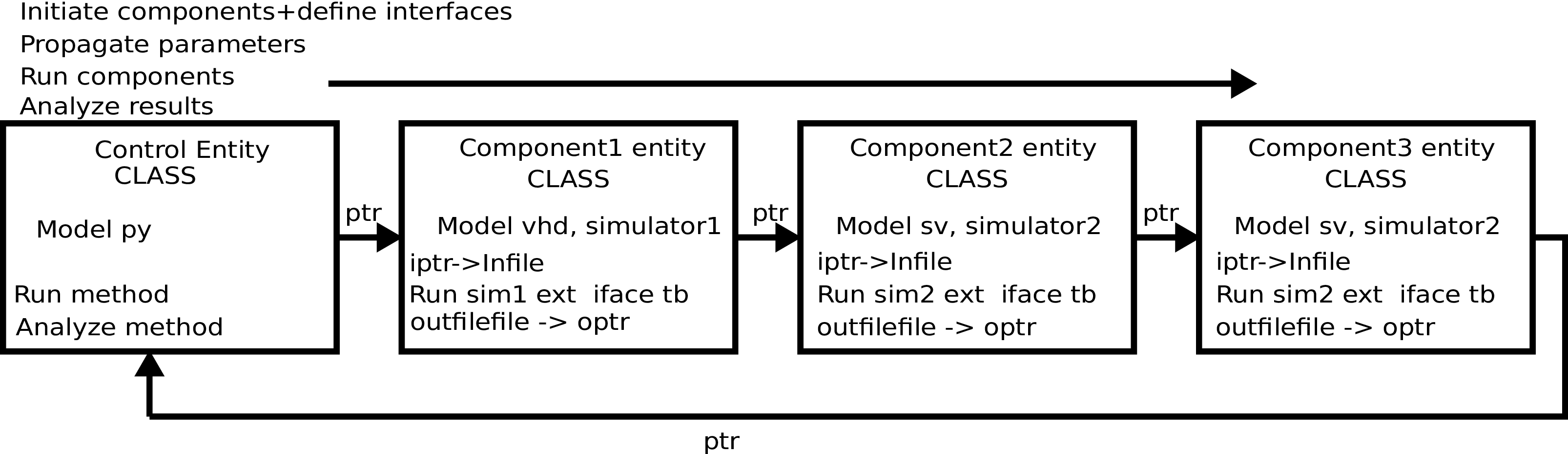
The entity object can contain almost anything, but it should follow two principles.
Inputs and outputs are pointers defined by TheSyDeKick IO class.
Entity object, i.e. instance of thesdk class has a method that takes the value of an input pointer, manipulates it and assigns it to the value of the output pointer.
This make is possible to first implement the connections between the objects, i.e. system components, and then pass the signals by calling the run methods of the objects in controlled order. The call sequence control of the components ultimately form a scheduler, but currently this control is up to user.
Read this introduction first, and after that, we strongly encourage you to clone the repository and study the tutorial https://github.com/TheSystemDevelopmentKit/TheSyDeKick_tutorial , and take time to get acquainted with Entities/inverter, Entities/inverter_testbench, and Entities/inverter_tests .
Later on you may study the documentation of thesdk, rtl and spice presented in this manual.
These should give you a picture how the things work.
System modeling and design exploration
It is evident that high level programming languages provide good tools for system modeling. In addition, it is intended to develop interface classes for Berkeley Analog Generator BAG and Chisel RTL generators to enable closed-loop design optimization and design exploration with real hardware.
Project status and releases
Release schedule
Annual release date currently planned: June 14. Current release candidate branches for next release are named ‘v1.xx_RC’
Projected roadmap for the next release
Argparser in thesdk class to provide the most common command line arguments for simulation control.
Support for CoCoTb.
A bit longer term roadmap
Server based RTL and analog simulation enabling single-sample push-pull and multi-tool feedback simulations as in CoCoTb.
Release history
Release v1.13 (29.3.2025)
Main progress: ( See: https://github.com/TheSystemDevelopmentKit/thesdk_template) Decision to drop the January release date for future developments, as the environment is quite stable already.
- RTL
More freedom to control design names and simulator call directory location.
- Spice
Steady state, S-parameter, noise analysis, and periodic AC simulations for spectre.
Stability analysis for spectre.
Pole-Zero analysis for spectre.
- Ads
Ads entity was renamed to ‘momem’ to better reflect the nature of the interface: ADS momentum electromagnetic simulator.
Support added for EMX simulator.
Electromagnetic simulation features and documentation improved.
Release v1.12 (6.10.2024)
Main progress: ( See: https://github.com/TheSystemDevelopmentKit/thesdk_template)
- RTL
Support for Verilator.
Support for mixed language designs with improved control over compile order for RTL simulator(s).
Compilation and simulation optimization control for (some) RTL simulators to trade off waveform resolution to simulation speed.
Further improved timescale handling in RTL simulations.
- Spice
Fixes to power consumption extraction.
- Design entities
Support for Verilator added to inverter and inverter_tests.
Make recipes to inverter_tests: ‘open’ to choose open source simulators only. Recipe ‘proprietary’ runs tests with proprietary simulator(s).
Release v1.11 (15.2.2024)
Main progress: ( See: https://github.com/TheSystemDevelopmentKit/thesdk_template)
Possibility to define custom simulation result paths.
Fixes for simulation path handling.
Improved failure handling for parallel runs.
Fixes for RTL control file handling.
Improved timescale handling in Verilog simulations.
Possibility to define Verilog and VHDL library files.
Improved post layout simulation handling for spice.
Release v1.10 (28.6.2023)
Main progress: ( See: https://github.com/TheSystemDevelopmentKit/thesdk_template)
Support for python 3.10
Support for VHDL testbenches and introduction of ‘lang’ attribute to select between System Verilog or VHDL testbenches.
Support for GHDL open source VHDL simulator.
Optional custom end condition for RTL simulation through end_condition property.
Attribute simulator_control file and simulator_control file_contents for additional non-interactive simulation control.
- Changes possibly causing backwards-compatibility issues:
Simulator specific control file not executed for batch runs (original intended form of operation).
Python parameter interactive_control_file_contents overrides the file contents.
All Verilog_<name> attributes have been changed to RTL_<name> attributes, as attributes are now language agnostic.
Release v1.9 (7.4.2023)
Main progress: ( See: https://github.com/TheSystemDevelopmentKit/thesdk_template)
Major refactoring of RTL module to separate handling of different simulators and alleviate future development for additional simulator interfaces.
Major refactoring of spice module to separate handling of different simulators.
Faster result parsing of spice netlists and sub-circuit definition files.
Faster parsing of spice simulation results.
Uniformly sampled outputs from spice simulations
Release v1.8 (3.8.2022)
Main progress: ( See: https://github.com/TheSystemDevelopmentKit/thesdk_template)
Improved documentation: Core blocks documented with CI/CD at https://thesystemdevelopmentkit.github.io/docs/index.html
ADS simulator interface module.
Speedup for module addition to Python path
Support for parametrized netlists
Custom source locations for RTL simulations
Bugfixes for VHDL simulations
Several bugfixes for spice simulations
Release v1.7 (20.1.2022)
Main progress: ( See: https://github.com/TheSystemDevelopmentKit/thesdk_template)
Improved documentation in spice
Unified IO file handling in all analog simulators
Speed up of event-based IO file handling.
Improved intermediate file cleanups.
Possibility to save the state of an entity to a binary file and read it back.
Colored log messages for improved clarity.
File cache flushing speeds up RTL simulations.
Custom RTL simulator do-file locations and possibility to control the content of the do-file from Entity.
Improved parallel run execution.
Release v1.6 (11.8.2021)
Main progress: ( See: https://github.com/TheSystemDevelopmentKit/thesdk_template)
Support for NGSpice
Support for AC simulations in spectre, Eldo, and NGSpice through modifications in IO file handling. Less tested with Eldo.
Model ‘hw’ for measurement equipment driver support.
Currently supported models: Python, Verilog, VHDL, Eldo, Spectre and NGSpice netlists.
Simulation speed up for RTL event type IOs through with sorted dicts.
Development has been carried out for Python v3.6, runs also with python 3.9
Release v1.5 (16.1.2021)
Main progress: This is mainly an bugfix and documentation improvement release. ( See: https://github.com/TheSystemDevelopmentKit/thesdk_template) initentity now initializes the minimum bare-bone buffer. Use of more complex template is optional.
Python dependency installations now optionally upgrade already installed packages. * Currently supported models: Python, Verilog, VHDL, Eldo and Spectre netlists. * Development has been carried out for Python v3.6
Release v1.4 (14.6.2020->7.10.2020)
Main progress: Support for Mentor graphics Eldo and Cadence spectre merged to common ‘spice’ module ( See: https://github.com/TheSystemDevelopmentKit/inverter or the thesdk_template)
Currently supported models: Python, Verilog, VHDL, Eldo and spectre netlists.
Development has been carried out for Python v3.6
Release v1.3 (16.1.2020->24.1.2020)
Main progress: Verilog and VHDL modules merged to RTL module. VHDL entities are now simulated with Verilog testbenches.
Support for Mentor Graphics Eldo analog simulator through Eldo module. See: https://github.com/TheSystemDevelopmentKit/inverter
Initiated documentation with docstrings. Html documentation provided for entities with ./configure && make doc, or by running make html in entities doc directory.
Configuration quickstart
OBS THE SCRIPTS TO BE SOURCED ARE WRITTEN FOR T-SHELL
If you’re using some other shell, change to tcsh or modify the scripts to be compliant with your shell.:
tcsh
TheSyDeKick release 1.11 has been tested with Python v3.11
Go to TheSDK directory and run:
./init_submodules.sh ./pip3userinstall.sh ./configure
Edit the TheSDK.config file so that the commands for python invocations are correct. By default LSF submissions are enabled in TheSDK.config. If you do not have LSF, please disable it from TheSDK.config The variables defines the commands used in Makefiles for simulation submission main thing to decide here is if you have LSF compliant cluster environment or not. Modify commands accordingly.
The simplest possible simulation is defined in Entities/myentity/myentity/__init__.py To test your Python installation and configuration:
cd Entities/myentity ./configure && make all
You should see a input and output waveforms of a buffer model.
Configure circuit simulators ( vsim, eldo, spectre etc.) tools to your path, modify sourceme.csh if needed and source it:
source sourceme.csh
To test your environment:
cd Entities/inverter ./configure && make clean && make all
If you wish to test the Python functionality only, edit Entities/inverter/inverter/__init__.py and Change the line:
models=[ 'py', 'sv', 'vhdl', 'eldo', 'spectre' ]
to:
models=[ 'py' ] and run :: ./configure && make clean && make all
How to use TheSyDeKick
TheSyDeKick is a multi-tool simulation and development environment for developing systems. It targets to using a single control environment to simulate,design and measure the system components with various tools by using a single “Control environment” for control, analysis, and visualization of the results.
Implementation the “Control environment” is written in Object-oriented Python. Python selected based on its good support for computing and signal processing, and support for interfaces to measurement equipment..
Naming and structure
The files are organized in directories as follows:
TheSDK
pip3userinstall.sh
init_submodules.sh
configure
TheSDK.config (generated by configure)
Entities
|
entity1
entity1
|
__init__.py
other_module.py
vhdl
|
entity1.vhd
tb_entity1.vhd
sv
|
entity1.sv
tb_entity1.sv
spice
|
entity1.cir
tb_entity1.cir
simulations
rtlsim
|
work
Naming convention is strict. The placeholder string ‘entity1’ above identifies the name of the Entity and it’s netllists and testbenches. User is not allowed to freely name the files. This is the basic configuration.
Guidelines to follow
All component descriptions, called Entities, regardless of the used tool/language are located under Entities directory.
Git submodules are initiated with script init_submodules.sh. This is to give controlled method to select what submodules to init.
Things are configured with script named configure, that generates the Makefile.
Things are executed with make <recipe>
configure && make structure is used because by always following that we never need to document how to do configurations and executions.
The main feature of TheSyDeKick is how to connect these objects (Entities) together. - IO’s are pointers to a Data field of an IO class instance. - Drivers write to that data field. - Input read from that data field.
Following this guideline your entities retain compatibility with the TheSyDeKick entities. See Entities/inv_sim/inv_sim/__init__.py for reference.
Entities are documented with docstrings. To read the entity documentation, do:
cd Entities/rtl ./configure && make doc firefox ./doc/build/html/index.html
Documentation is NEVER compete or good enough. Feel free to improve.
How to create and test new entity
Create a new entity with:
cd ./Entities
../thesdk_helpers/initentity <NAME>
Test the new entity:
cd <NAME> && ./configure && make all
See ../thesdk_helpers/initentity -h for help The new entity is created as a git project. Push it to your favourite repository
Class organization guideline
This is not a strict rule set, rather a guideline how to alleviate your modeling tasks and support modularity.
The Entities and simulation setups are implemented as classes that cross-reference to each other without restrictions. (Hardware) modules are instantiated as object of that class.
TheSyDeKick classes are intended to collect methods common to “TheSyDeKick”-framework. They should NOT contain anything specific to a particular design.
RTL class defines properties and methods that are required to run Verilog and vhdl simulations.
Spice class defines properties and methods that are required to run eldo and spectre simulations.
If component has an RTL model, it should be a subclass of RTL. If component does not have RTL as a superclass, RTL-requirements do not apply.
Design specific classes are freely defined by the designer
A “system_parameter_class” may used as super class for the “system_tests” and “system_testbench” (not subcomponent entities) to define the properties that typically
Are common to whole system design.
2. Need not to be altered between simulations, but are most often propagated through property inheritance.
EXAMPLE of design hierarchy:
system_tests
|
system_testbench
|
"system"
/ \
"entity1" "entity2"
|
"entity3"
Typically a simulation is controlled by “system_testbench” class that controls the simulation providing (or using) methods like “run” and “plot”. This class usually contains a “design under test”, which is a instance of “system” class, and methods required to run the simulations. See: Entities/inverter_testbench/inverter_testbench/__init__py.
System is described in “system” class that determines the sub-components and the interconnections in between them, and methods to “run” the “system”, i.e. how the signals propagate and in which order the methods of components are executed. Take a look at Entities/inverter/inverter/__init__.py and Entities/inverter_testbench/inverter_testbench/__init__.py
As the test cases for inverter_testbench is extremely simple, the DUT is constructed inside the testbench is constructed inside it with ‘parallel’ and ‘serial’ methods. For more complex systems this is not preferred way. This construction should happen in ‘system’ class that creates the top level description of the system.
Class attributes are controlled and propagated by class constructor by copying the selected properties from immediate “parent”. The properties that are to be copied are determined by “proplist” attribute. By doing this instead of using inherited classes, we keep entities independent of their use environment i.e. they can be used freely in other designs. Still we can automate the propagation of the parameters.
Component entities Entity1-Entity-3 are not subclasses to sim or system class as they should be independent of each other and transferable between systems.
The “system_tests” and “system_testbench” class should not be a parent class to system class, as the “system” definitions are independent of how it is simulated.
What next?
Take your time to get acquainted with Entities/inverter, Entities/inverter_testbench, and Entities/inverter_tests together with the documentation of thesdk, rtl and spice presented in this manual. Those should give you a picture how the things work. Create a new entity, and start playing a round with it.
See also: https://github.com/TheSystemDevelopmentKit/TheSyDeKick_tutorial